Technology Tip: Primer on Sensors - part two of three
By Peter Ruplinger
Reprinted from Utah Molders Quarterly Newsletter December 2006
Every injection molder has sensors. Part one of this series gave an overview of limit switches, proximity sensors, and incremental shaft encoders. This section discusses gray encoders, linear transducers, resolvers, resistive position detectors and photo sensors. Be sure to read the manufacturer’s safety precautions and application guidelines.
Gray Encoders are very similar to incremental encoders, discussed in Issue One. They can be optical, where photo sensors scan transparent sections in a rotating glass disc, or they can be magnetic sections on a polymer disc and are sensed by electronic sensors. Gray encoders differ in that where an incremental encoder has just one track of pulses to count, gray encoders have from four to sixteen tracks. The tracks are arranged in concentric circles. This also means that gray encoders have four to sixteen data lines instead of just one. The advantage is that a gray encoder will show the exact position of the shaft, rather than just count increments of movement. Gray encoders are sometimes called absolute encoders. They report the absolute position of a rotating shaft.
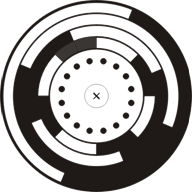
Naturally, the more tracks the more accurate the positioning. The following illustration shows a gray encoder disc with four tracks. This encoder would have four sensors, one for each track. The four sensors produce a four bit binary signal. “Four bit binary” is computer jargon for a four-digit number consisting of zeros and ones. That is because each sensor can be on or off. Four tracks and four sensors produce a binary value from zero to fifteen. Consequently, the rotation of a shaft can be monitored with accuracy of sixteen equal segments with just four data lines. Eight data lines provide an eight-bit signal, with 256 positions of rotation.
Linear transducers If we were to take a gray encoder and lay it out flat, we would have a measurement device similar to a linear transducer. Linear transducers are often used to monitor the exact position of an injection molder’s clamp. Most mills also use linear transducers. They monitor the position of the bed in thousandths of an inch.
Resolvers serve the same function as gray encoders, but they use an analog signal rather than a discrete signal. “Discrete” means exact. For example, a binary value of “1001” is an exact value represented by four data lines. “Analog”, on the other hand, refers to a proportional, non-exact value; for example, 4.5 volts D.C. Resolvers are constructed similar to a small D.C. generator. They typically have four to eight coils. Each coil produces a signal which consists of a D.C. voltage. The signals are analyzed by a controller which interprets the exact position of the shaft by measuring and comparing the voltages (analog signals) produced by each signal.
Resolvers were popular in the sixties and seventies. They became less popular with the advent of micro-processors and encoders in the eighties. In recent years with faster and cheaper micro-processors they have become popular again.
Resistive sensors are another form of an analog position sensing device. They are rather simple. In theory they consist of little more than a variable resistor with a cord attached to the knob. Older technology presses use them to monitor clamp position. The cord is a steel tape rather than a string. It is coiled around the variable resistor shaft and rotates the shaft as the clamp moves. The controller interprets position from the variable resistance signal.
Photo sensors come in a variety of shapes. Like proximity sensors, discussed in Issue One, they are usually barrel shaped, varying form as small as four millimeters to thirty millimeters in diameter. They are typically 24 volts D.C. or 115 volts A.C. Like proximity sensors they can be either normally open or normally closed. They can be sourcing or sinking. Some have multiple signal leads or switches which provide the option of selection. They often have a small screw which adjusts the signal strength. LED (light emitting diode) lamps, on some units, facilitate trouble-shooting.
They come in three types: through beam, reflective, and retro-reflective. Through beam are the most accurate. They consists of two units, a sender which emits a light beam and the receiver which receives it. Reflective sensors only have one unit. It emits a beam of light which is reflected off a white plastic reflector or a strip reflective tape. The signal is then received by the same unit. Retro-reflective sensors reflect light off the object to be sensed. They tend to be less predictable.
Some sensors employ fiber optics to direct the light beam into a small, often hard to get to area. They are also useful to produce a very small or specially shaped beam of light.
Most photo sensors utilize light in the infrared spectrum. It is less susceptible to blockage form dust on the lens and is less susceptible to interference from ambient light. Sensors can be specified at particular wavelengths to eliminate cross talk.
In part three we will discuss analog sensors.
Primer on Sensors - Part Three